简述示教点位的具体方法?
2023-01-23本文主要是 简述示教点位的具体方法? 相关的知识问答,如果你也了解,请帮忙补充。
在生产车间我们不可能随时都带着笔记本电脑去校正点位,这时候TB 就起到了至关重要的作用,使用TB校点之前我们同样要在程式中追加相应点位。然后通过TB修改各个点位的坐标参数。步骤如下:
1、首先马达SOV ON
打开TB后面的操作权按键,将黄色开关向左或向右掰到第一挡,然后回到按键界面点击SERVO 这时候会听到机械手马达“哒~”的声响,并且SERVO 灯亮。

请点击输入图片描述

请点击输入图片描述
2、TB找点
马达SOV ON之后点击JOG 按键移动机械手,常用的JOG模式有三种,XYZ、JOINT、TOOL模式。最常用的是前两种,切换方式为点击模式相对应的F1~F4按键进行切换。

请点击输入图片描述
点位调试完成之后点击FUNCTION 键,找到CLOSE功能,点击相应的功能键退出点位调整模式。

请点击输入图片描述
3、修改点位坐标参数
退出点位调整回到主界面后,点击EXE按键,进入MENU菜单页面,选择第一个FILE/EDIT 档案/编辑功能(按EXE键或直接点击1)
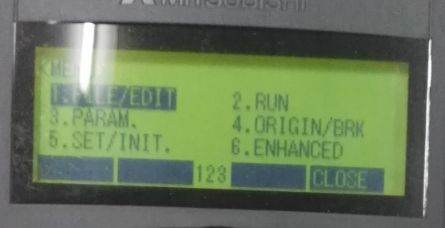
请点击输入图片描述
进入档案编辑功能菜单选择需要修改点位的程式(按 上下 键选择程式,按EXE键确认选择或直接点击相应数字)
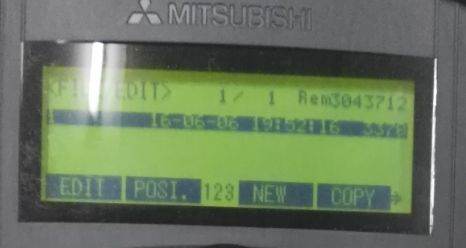
请点击输入图片描述
进入程式后按FUNCTION 键,选择CHANGE功能
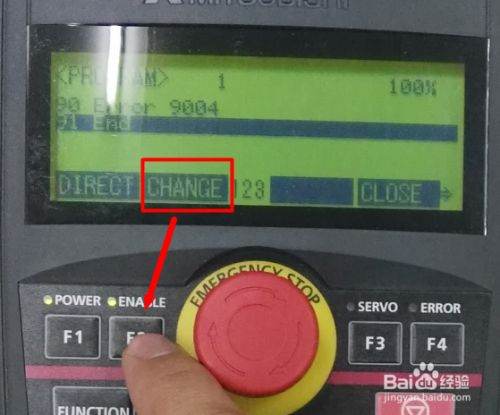
请点击输入图片描述
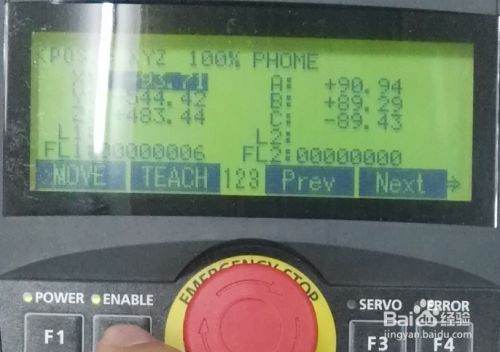
通过点击PREV和NEXT键来切换到想要调整的点位。
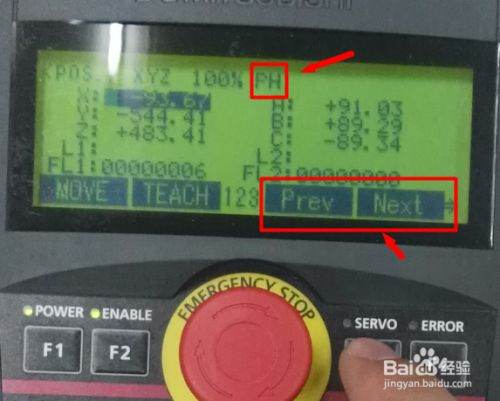
请点击输入图片描述
确认点位后点击TEACH相对应的F按键。
请点击输入图片描述
此时系统会再次让你确认点位是否OK(当前位置所对应的点位是否正确),确认无误后点击YES相对应的F功能键即可。TB会发出“嘀~”的声响,此时点位校正完成。

请点击输入图片描述
1、直角坐标法;2、极坐标法;3、角度交会法;4、距离交会法;5、方向交汇法。测
提问工业机器人编程与调试的简述示教点位的具体方法
回答服务异常?
开启手动操作流程 .控制器前部装有控制电源开关、外部存储装置、操作面板等:用电缆将其连接 到位于控制器前部的连接器上来使用示教器。不用时请将示教器放置在控制箱 体悬挂处。 ”冰风网: ●首先,确认外部电源给控制器供电:第二,将机器人控制柜上的切换开关切换 到TEACH档,确保所有人员都处于安全区域即机器人工作半径以外:第三, 使马达上电,按下示教器中的A+马达开,此时示教器画面上的右上角的 MOTOR灯点亮,如马达未上电请检查各个急停按钮是否旋开。此时如果机器 人运行灯点亮即右上角的RUN灯点亮,在触发板触发后机器人即可手动操作, 若右上角指示灯为HOLD机器人处于保持状态,需要在示教器上按下A+运行即 可。利用宗教器上的按钮手动操作机器人六轴.
2、示教器的外观 示教器上提供了手动操作机器人和编辑数据所必须的硬件 按钮和开关。示教器上时液晶屏可以显示各种各样的数据
、示教器上的开关和硬件按键的功能 手动操作机器人的标准方法,也叫做Jogging(点动)。 通常装备的六轴机器人,如图体3所网这些轴分别称为JT1到 JT6,但有时也用以前的习惯称呼 mted.com ; JT1=R轴,JT2→0轴, JT3→D轴, JT4≈S轴,JT5≈B轴, JT6≥T轴 通过按下机器人示教器上的6轴+按钮控制机器人的点动。
、示教是一种机器人的编程方法,示教分为三个步骤: 1)示教,就是机器人学习的过程,在这个过程中,操作者 要手把手教会机器人做某些动作。 2)存储,就是机器人的控制系统以程序的形式将示教的 动作记忆下来。 3)再现,机器人按照示教时记忆F来的程序展现这些动作
提问简述切割时激光,关闭应该在哪个点位打开激光,在哪个点位关闭激光
回答在切板软件下回原点→关闭激光器→ 关闭切板软件→打开切管软件→由切板扭到切管→移动到 左侧回原点→开激光器→上管→点击工艺参数→...
提问谢谢
回答不客气哦